无人驾驶车辆模型预测控制程序代码
”无人驾驶车辆 模型 预测 控制 程序代码“ 的搜索结果
无人驾驶车辆模型预测控制程序,程序摘之无人驾驶车辆模型预测控制书本,程序完好可运行。
无人驾驶车辆模型预测控制程序,程序摘之无人驾驶车辆模型预测控制书本,程序完好可运行。
无人驾驶车辆模型预测控制代码
基于无人驾驶车辆模型预测控制例程,对应教材的例程
# 无人驾驶车辆模型预测控制 本文介绍了无人驾驶车辆模型预测控制的基本概念和应用。无人驾驶车辆模型预测控制是一种基于模型的控制方法,通过对车辆模型的建模和预测,实现对车辆的控制。 ## 无人驾驶车辆模型 ...
无人驾驶车辆模型预测控制 第二版 程序代码 北理工
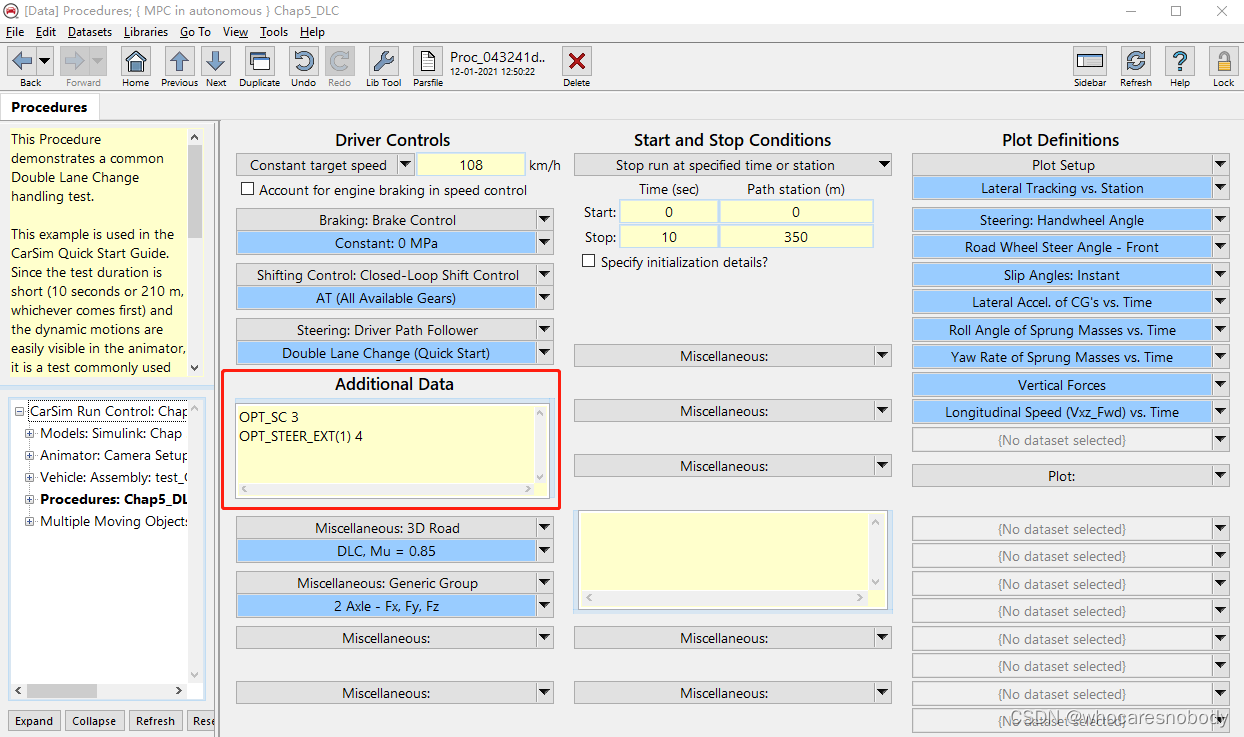
北理工无人驾驶车辆模型预测控制第4、5章代码勘误 以下内容为实际使用过程中发现的小问题,不代表原代码逻辑错误。 第4章 程序约束生成区域中 delta_umin=[0.05;-0.0082;]; 应改为: delta_umin=[-0.05;-0.0082;...
无人驾驶车辆模型预测控制.rar 这是无人驾驶车辆模型预测控制书籍的配套程序

北理无人驾驶第二版 第四章代码详细注释版
%《无人驾驶车辆模型预测控制》3.3.3代码详解%代码下载链接:http://www.bitpress.com.cn/book/book_detail.php?id=9055%北京科技大学 白国星注释 [email protected];%清空命令空间,目的是好看clear all;%...

主要针对《无人驾驶车辆模型预测控制》这本书的第三章3.3.3的工程实例进行详细的代码分析,结合自己在学习以及推导的MPC算法的一些理解。 书中源代码 以无人驾驶车辆的轨迹跟踪问题作为应用的背景,无人驾驶车辆在...
《无人驾驶车辆模型预测控制(第一版)》中的错误更正与代码解析(一) 以下内容针对**第三章**中的工程实例 错误点 1 问题分析中的运动学方程: [x˙ry˙rφ˙r]=[cosφsinφtanδf/l]vr \begin{b...
龚建伟第二版书中可行的程序,遇到问题大家一起留言讨论进步学习。
无人驾驶车辆模型预测控制仿真程序,通过建立运动学模型,对跟踪控制进行了研究
此代码是关于无人驾驶车辆的轨迹跟踪模型预测控制算法实现

无人驾驶车辆模型预测控制(MPC)是一种智能矢量控制方法。本文的主旨是使用MPC来设计一个控制器,以在无人驾驶车辆模型中获得高性能和稳定性。 对于无人驾驶车辆模型,它的动态特性往往非常复杂,包括非线性和时变...
MPC无人驾驶车辆模型预测控制是一种基于动力学轨迹跟踪的控制方法,它通过对车辆动力学模型的建模和预测,实现了对车辆路径的精确控制。MPC无人驾驶车辆模型预测控制的核心思想是在每个控制周期内,利用车辆动力学...



无人驾驶车辆模型预测控控制基于RLS算法的车辆侧偏刚度估算,、基于递归最小二乘法在线识别轮胎前后侧偏刚度,估计侧偏刚度的大小,一旦发货,不能退货,支持加价远程联合仿真,有简单的视频讲解。

MPC function [sys,x0,str,ts] =MY_MPCController3(t,x,u,flag) %***************************************************************% % Input: % t是采样时间, x是状态变量, u是输入(是做成simulink模块的输入,即...

推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地